
Quando falamos em mobilidade do futuro, é comum imaginar carros autônomos, frotas elétricas e, claro, veículos voadores. Pois bem: essa realidade deixou de ser cena de ficção científica e passou a ganhar contornos práticos com o voo inaugural da sexta geração do eVTOL (electric Vertical Take-Off and Landing) da Wisk Aero, subsidiária da Boeing. Trata-se de um marco porque combina três tendências poderosas — eletrificação, autonomia e aviação urbana — em um único sistema de transporte. Neste guia definitivo, vamos dissecar todos os aspectos que giram em torno dessa novidade: de como a tecnologia funciona aos possíveis impactos socioeconômicos, passando pelos desafios regulatórios e pelas oportunidades para o mercado brasileiro.
1. Entendendo o Conceito de eVTOL e Táxis Aéreos Autônomos
1.1 O que é um eVTOL?
O termo electric Vertical Take-Off and Landing descreve aeronaves elétricas capazes de decolar e pousar verticalmente. Diferentemente dos helicópteros tradicionais, o eVTOL utiliza múltiplos rotores distribuídos, acionados por motores elétricos de alta eficiência e alimentados por baterias ou células de combustível. O resultado é um veículo normalmente mais silencioso, com manutenção simplificada e emissão zero de carbono no ponto de uso.
1.2 Por que falar em “táxi aéreo”?
Assim como um táxi terrestre, o objetivo é transportar passageiros em percursos curtos ou médios dentro e entre grandes centros — porém, sobrevoando o tráfego. A ideia é integrar vertiportos (helipontos adaptados) a terminais de metrô, aeroportos e polos empresariais, criando um sistema door-to-door de alta velocidade. Para isso, o custo por quilômetro precisa ser competitivo com transportes premium em solo, e a operação deve ser tão simples quanto chamar um veículo por aplicativo.
1.3 O diferencial da autonomia total
A maioria dos projetos atuais prevê um piloto a bordo no lançamento comercial, migrando gradualmente para a operação autônoma. A Wisk inverteu a lógica: o veículo já foi concebido sem manche, sem pedais, sem piloto. Toda a tomada de decisão se baseia em algoritmos certificados, enquanto um operador em solo — denominado “Supervisor Multiveículos” — monitora até três aeronaves simultaneamente. Essa arquitetura reduz custos operacionais e, principalmente, elimina o fator humano em situações de fadiga ou erro de julgamento.
2. Linha do Tempo: Da Prova de Conceito ao Sexto Protótipo
- Geração 1 (2010-2012) – Prova de conceito para validar propulsão elétrica distribuída.
- Geração 2 (2013-2014) – Estrutura em escala reduzida, testes de estabilidade e hover.
- Geração 3 (2015-2016) – Primeira demonstração pública; autonomia inicial inferior a 40 km.
- Geração 4 (2017-2019) – Transição vertical-horizontal otimizada; velocidade de cruzeiro ultrapassando 160 km/h.
- Geração 5 (2020-2024) – Protótipo visava pré-certificação; incorporação dos primeiros sistemas avançados de detect-and-avoid.
- Geração 6 (2025) – Objeto deste guia; primeiro veículo de passageiro genuinamente autônomo em vias de obter a certificação de tipo da FAA.
Essa curva de aprendizado de mais de uma década fornece robustez ao projeto. Enquanto concorrentes ganharam manchetes com voos tripulados, a Wisk refinava algoritmos de controle, redundância de sistemas e modelos de negócios baseados em autonomia plena. O resultado é um protótipo que de fato mira a operação comercial escalável.
3. Arquitetura Técnica da Sexta Geração da Wisk
3.1 Design e Propulsão
A aeronave adota um layout de asa fixa combinada a flaperons — superfícies que atuam como flaps e ailerons — para garantir eficiência aerodinâmica em voo de cruzeiro. Nos extremos da asa, oito rotores inclináveis proporcionam sustentação vertical na decolagem e pouso. Durante a transição, esses rotores se inclinam gradativamente até 90°, convertendo empuxo vertical em horizontal. Esse processo dura aproximadamente 30 segundos.
3.2 Especificações Principais
- Velocidade de cruzeiro: 120 nós (~222 km/h).
- Autonomia de operação: estimada em até 145 km (dependendo de perfil de voo e reserva de bateria).
- Capacidade: 4 passageiros + bagagem de mão.
- Altura operacional típica: entre 300 m e 500 m sobre áreas urbanas.
- Redução de ruído: até 90% menor que helicópteros convencionais em cruzeiro, segundo medições internas.
3.3 Sistemas de Energia e Baterias
O veículo emprega packs de lítio-íon de alta densidade, mas com química otimizada para ciclos rápidos de carga — condição essencial em operação de frota. Cada módulo é “plug-and-play”, permitindo troca rápida (swap) ou recarga direta em vertiportos. A Wisk estuda a adoção futura de baterias de estado sólido, capazes de elevar em 30% a densidade energética e reduzir risco de incêndio térmico.
3.4 Aviônica e Sensores
- Lidar/Optical Radar: mapeia obstáculos em 360°.
- Câmeras estereoscópicas: reconhecimento de obstáculos dinâmicos, drones e aves.
- Radar de banda curta: robustez em neblina ou chuva intensa.
- Inercial + GNSS redundantes: navegação de precisão centimétrica.
- Uplink 5G/ Satcom: comunicação criptografada com o centro de controle.
A fusão dos sensores alimenta um sistema de decisão em tempo real, com camadas redundantes. Caso um sensor falhe, a lógica de contingência garante pouso seguro no heliponto mais próximo.
4. Operação Autônoma: Do Algoritmo ao Supervisor Multiveículos
4.1 Níveis de Autonomia na Aviação Urbana
Inspirada na escala automotiva SAE, a indústria de eVTOL costuma adotar cinco níveis:
- Nível 0: Totalmente manual (helicóptero tradicional).
- Nível 1: Assistência parcial (piloto + piloto automático simples).
- Nível 2: Piloto supervisiona, mas sistemas controlam velocidade/altitude.
- Nível 3: Autonomia condicional; piloto assume em exceções.
- Nível 4: Totalmente autônomo em rotas designadas (Wisk Geração 6).
- Nível 5: Autonomia plena em qualquer espaço aéreo sem suporte externo (ainda conceito).
4.2 Como Funciona o Supervisor Multiveículos
Em vez de um piloto, um profissional em solo monitora até três aeronaves simultaneamente por meio de um centro de controle. Caso se detecte anomalia (meteorologia adversa, mal-funcionamento de sensor, interferência), o supervisor pode:
- Reprogramar rotas em tempo real.
- Autorizar pouso antecipado em vertiporto alternativo.
- Acionar protocolos de emergência (ex.: descida automática controlada).
Esse modelo reduz o custo por assento-quilômetro, elemento chave para viabilizar o preço de passagem competitivo. Além disso, a ausência de peso do piloto libera espaço e capacidade de carga para passageiros.
4.3 Safety Case: Redundância x Confiabilidade
A Wisk persegue a meta de “10⁻⁹ eventos catastróficos por hora de voo”, parâmetro similar ao de aeronaves comerciais. Para atingir isso, todo sistema crítico (bateria, fonte de alimentação, barramento de dados, atuadores) possui redundância N+1. Em simulações, até dois motores podem falhar durante a transição sem perder controle de voo.
5. Certificação e Desafios Regulatórios
5.1 O Papel da FAA
No contexto norte-americano, a Federal Aviation Administration exige que qualquer aeronave com propulsão alternativa demonstre equivalência de segurança aos aviões Part 23. No caso de um veículo sem piloto, a avaliação se estende aos algoritmos de decisão. A FAA analisa não apenas hardware e software, mas também os processos de desenvolvimento e as métricas de cibersegurança.
5.2 Roteiro Típico de Certificação de eVTOL
- G-1 Issue Paper: definição de requisitos específicos.
- Padrões de Conformidade: testes estruturais, de vibração e de sistema.
- Flight Test Campaign: centenas de horas de voo em cenários simulados.
- Type Certification: autorização formal para produção em série.
- Operational Certification: liberação para serviço comercial.
Analistas projetam que a Wisk tente concluir as etapas 1-4 até 2028, prevendo lançamento comercial entre 2029 e 2030 em cidades como Houston, Los Angeles e Miami. A competição inclui Joby Aviation, Archer Aviation e Lilium, mas apenas a Wisk corre para certificar um modelo passenger-ready sem piloto.
5.3 Reflexo no Brasil
A Agência Nacional de Aviação Civil (ANAC) costuma harmonizar requisitos com a FAA e a EASA (Europa). Portanto, a certificação nos EUA deve acelerar a adoção local. Hoje, helicópteros já utilizam centenas de helipontos em São Paulo, fornecendo infraestrutura embrionária para vertiportos. O desafio será adaptar normas de tráfego aéreo (IFR em baixa altitude) e implantar corredores de voo segregados.
6. Impacto Econômico e Social da Mobilidade Aérea Urbana
6.1 Modelos de Negócio Possíveis
- Ride-sharing premium: serviço por demanda via aplicativo, similar ao Uber Black.
- Assinatura corporativa: empresas contratam pacotes mensais para executivos.
- Rotas fixas ponto-a-ponto: de hubs de transporte (ex.: aeroporto-centro financeiro).
- Carga leve expressa: durante horários ociosos, transporte de encomendas urgentes.
6.2 Quantificando o Mercado
Estudo da consultoria Morgan Stanley estima que a mobilidade aérea urbana movimente até US$ 1 trilhão em receita anual global em 2040. Supondo participação de 5% para a América Latina, teríamos US$ 50 bilhões, com o Brasil representando metade pelo tamanho de seus centros urbanos.
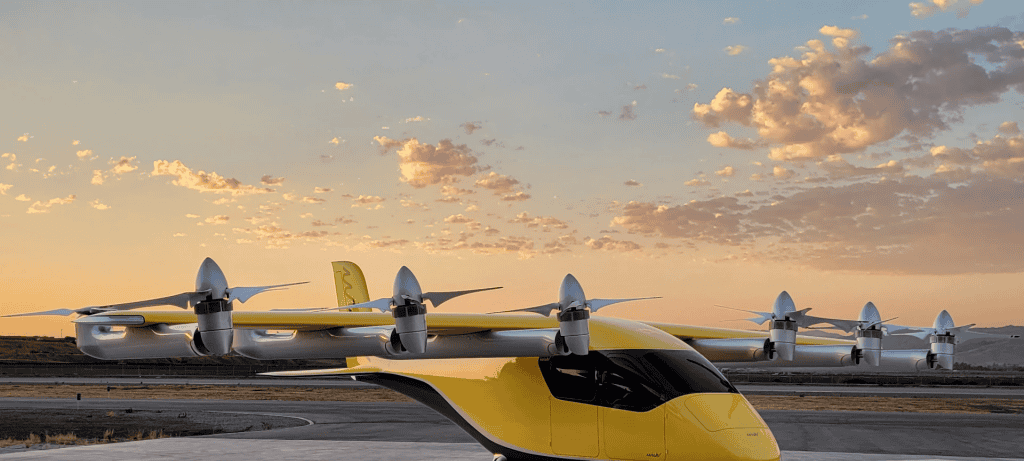
Imagem: Wisk Aero
6.3 Abordagem de Acessibilidade
Para não se tornar um serviço elitista, o preço-alvo de passagem gira em torno de US$ 3 a US$ 4 por quilômetro por passageiro nos primeiros anos — comparável a um serviço executivo de aplicativo. Com escalonamento, baterias mais baratas e multiplicação de rotas, a expectativa é reduzir esse valor abaixo de US$ 2. O ganho de tempo pode ser dramático: um trajeto de 40 km que levaria 90 minutos no trânsito paulistano cai para 12-15 min de voo.
7. Sustentabilidade e Desafios Ambientais
7.1 Emissão de Carbono
Considerando uma matriz elétrica parcialmente renovável, o eVTOL pode cortar emissões em até 90% comparado a helicópteros a querosene. Se utilizados créditos de energia solar ou eólica, o voo pode se tornar carbono-neutro.
7.2 Poluição Sonora
O ruído é medido em dB(A). Helicópteros de porte leve produzem 85-95 dB(A) em sobrevoos de 300 m. A Wisk promete 65-70 dB(A) em operação, similar a um aspirador doméstico ouvido dentro de casa. Isso facilita a aprovação em regiões densamente povoadas.
7.3 Ciclo de Vida das Baterias
As células de lítio-íon têm vida útil de cerca de 2.000 ciclos de carga. Para uma frota que realiza 8 voos diários, isso significa troca dos packs a cada 5-6 anos. Programas de second life preveem reutilizar as baterias em sistemas de armazenamento estacionário, reduzindo descarte prematuro.
8. Oportunidades e Desafios para o Brasil
8.1 Potencial de São Paulo como Laboratório Vivo
Com mais de 400 helipontos licenciados, a capital paulista já é considerada a “capital mundial dos helicópteros”. Adaptar parte dessa infraestrutura para eVTOLs exige:
- Instalação de sistemas de carregamento rápido (1-3 MW).
- Adequação de rotas para evitar zonas de aproximação de aeroportos.
- Integração multimodal (metrô, BRT, ciclovias).
8.2 Desafios Regulatórios Locais
Além da certificação da aeronave, será necessário rever:
- RBAC 91: regras operacionais para voos VFR em área congesta.
- RBAC 135: transporte comercial sob demanda.
- Gerenciamento de Risco de Obstáculos: prédios de grande altura e drones recreativos.
8.3 Fomento à Cadeia Nacional
O Brasil possui histórico em aviação geral (Embraer, Helibras) e pode participar com:
- Produção de componentes de compósitos e atuadores eletromecânicos.
- Desenvolvimento de software de controle adaptado ao espaço aéreo local.
- Implantação de vertiportos em parceria público-privada.
9. Comparativo: Wisk vs. Outros Players do Setor
| Empresa | Piloto a bordo? | Capacidade | Status de Certificação |
|---|---|---|---|
| Wisk Aero | Não | 4 pax | Em campanha de voo |
| Joby Aviation | Sim (fase inicial) | 4 pax + piloto | Fase de testes com piloto |
| Archer Aviation | Sim | 4 pax + piloto | Certificação em andamento |
| Lilium | Sim | 6 pax + piloto | Protótipo em voo |
A ausência de piloto confere à Wisk um modelo operacional mais econômico, mas adiciona complexidade regulatória. Joby e Archer optam pela via incremental: piloto primeiro, autonomia depois. O sucesso da Wisk criará jurisprudência para homologar voos totalmente autônomos, beneficiando todo o ecossistema.
10. Roadmap Tecnológico para 2030+
10.1 Baterias de Estado Sólido
A transição para eletrólito sólido promete densidade acima de 500 Wh/kg, dobrando a autonomia ou permitindo mais passageiros.
10.2 Hidrogênio como Vetor Energético
Células de combustível podem multiplicar a autonomia em 3-4 vezes, abrindo rotas intermunicipais. O desafio é armazenamento criogênico compacto.
10.3 Integração com Sistemas U-Space
Gerenciamento de tráfego aéreo digitalizado, com geo-fencing e atribuição dinâmica de rotas, será essencial para escalar dezenas de milhares de voos diários sem sobrecarregar controladores humanos.
Conclusão
O voo inaugural da sexta geração do eVTOL da Wisk Aero é muito mais que um feito de engenharia; ele sinaliza o amadurecimento de uma indústria destinada a transformar radicalmente a mobilidade urbana. Ao eliminar o piloto, a empresa inaugura um novo paradigma de operação, capaz de reduzir custos, ampliar a segurança e tornar o transporte aéreo acessível a um público muito mais amplo.
Os próximos anos trarão desafios significativos — da certificação rigorosa à integração com o espaço aéreo urbano —, mas também oportunidades imensas em termos de inovação, sustentabilidade e geração de empregos. Para o Brasil, que já possui expertise aeronáutica e demanda reprimida por soluções de transporte rápido, acompanhar de perto (e influenciar) essa evolução pode fazer toda a diferença.
Seja você investidor, engenheiro, gestor público ou apenas um entusiasta, entender os fundamentos técnicos, regulatórios e econômicos dos táxis aéreos autônomos é passo fundamental para participar de forma consciente dessa revolução que, literalmente, ganha os céus.

